Maritime Domain Awareness | Collision avoidance
- Customer
Commercial Shipping Company
- Partner
Furuno | Axis | HAT.tec
- Environment
Maritime
- LAbel
MDA
- Year
2026
The Challenge:
Navigating merchant vessels is becoming increasingly risky. In the Strait of Malacca, the Singapore Strait, and the Baltic Sea, hundreds of vessels transit narrow and congested waterways every day. At the same time, the situational picture around the vessel is increasingly degraded by jamming, spoofing, unreliable AIS data, and other irregular activities. Commercial shipping also requires tight schedules and continuous 24/7 awareness from the crew, while maritime traffic continues to increase. Legacy ship sensor systems such as radar have physical limitations and blind zones, and AIS can no longer be treated as fully reliable. This can leave the officer of the watch with an incomplete or inaccurate picture precisely when an accurate one is most critical.
The Approach:
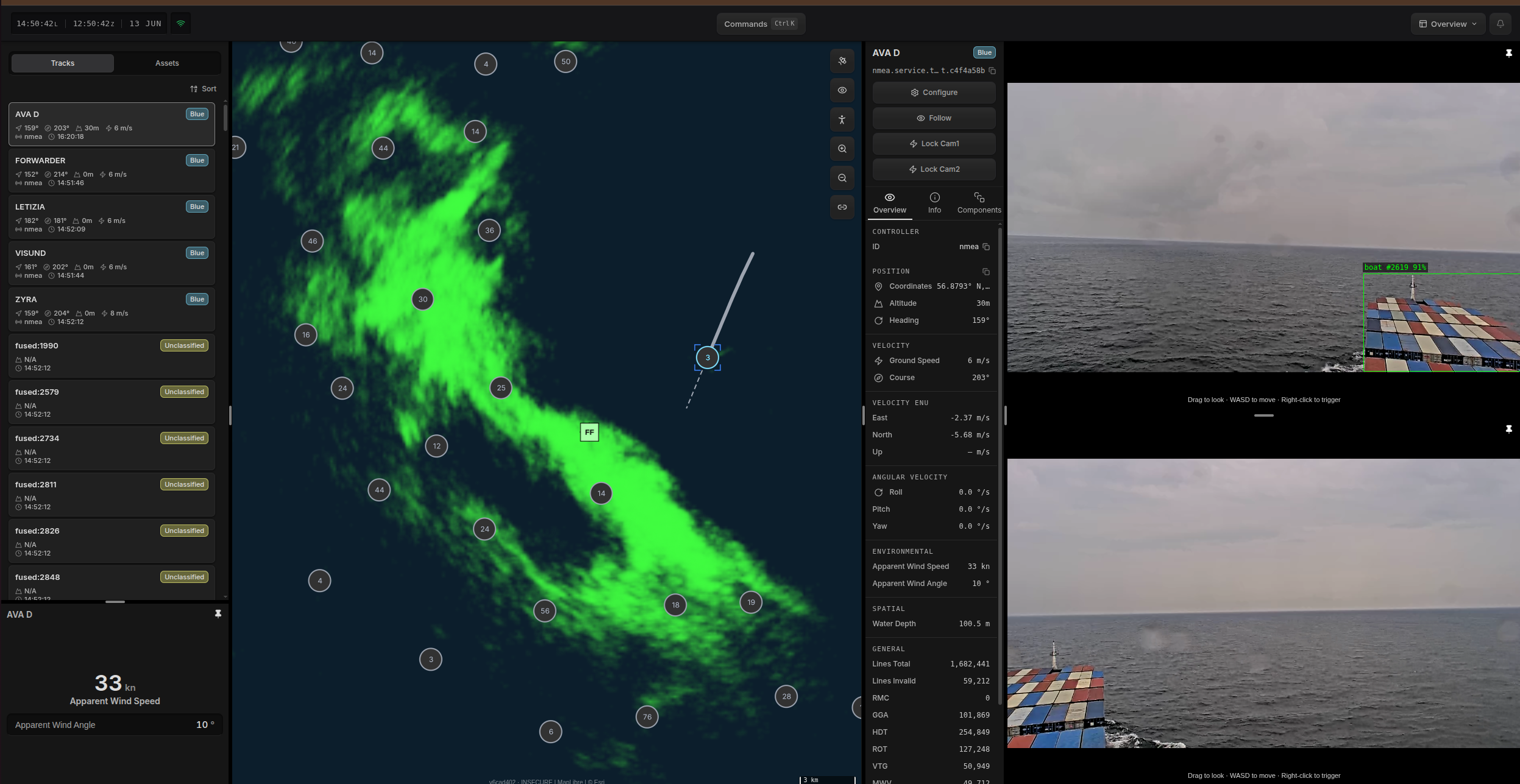
Our solution complements the vessel’s existing systems by providing a reliable, local, onboard situational awareness picture, including collision-avoidance support. It integrates onboard systems and augments them with additional COTS sensors. Hydris aggregates all data and generates a fast, easily understandable local maritime picture on the bridge and on mobile devices onboard. Building on this, and together with HAT.tec’s mission-management system SCALE, we provide a collision-avoidance capability that calculates the predicted movements of surrounding vessels and the own ship for Closest Point of Approach (CPA) or Time to Closest Point of Approach (TCPA). This enables the early identification of developing close-quarters situations. Onboard machine learning performs object detection and classification and provides decision support to the officer of the watch.
The Setup:
A multimodal sensor setup: Existing infrastructure (AIS, radar) and additional COTS systems (EO/IR cameras)
Hydris integrates and orchestrates all sensor data, fusing it into a local maritime awareness picture. It provides interfaces for tasking, automation, AI, and analytics.
HAT.tec Scale: As our partner, HAT.tec provides the graphical user interface, displaying relevant information as well as indicating collision warnings on a nautical chart application.
The Outcome:
As a result, Hydris provides a consolidated picture around the vessel, identifies threats before they develop, and recommends maneuvers to support safe passage. Hydris reduces the cognitive load on the bridge team in stressful situations. The operational picture remains available and reliable when GNSS is denied, AIS is unavailable, radar is physically limited, or shore connectivity is degraded or interrupted. Detection and classification run at the edge. Contacts and movements are detected, tracked, and logged for traceable and safe vessel operations — improving situational awareness and reducing collision risk.
- Q-Box
Running Hydris v0.9 — sensor fusion and rule execution at the edge.
- Q-Seismic × 8
Ground vibration sensors covering the perimeter boundary.
With onboard sensors and COTS extensions, reliable local maritime awareness emerges. This reduces the crew's cognitive burden and lays the foundation for vessel autonomy and remote fleet management.
- Onboard sensor fusion — radar, AIS, and EO/IR cameras fused at the edge
- Offline operation — no dependence on GNSS or a shore connection
- Operating Beyond AIS — tracks contacts AIS does not report
Other Missions served.

- Detect-to-Engage
- 2026
Counter-UAS | Monitoring Lower Airspace
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Suspendisse varius enim in eros elementum tristique. Duis cursus, mi quis viverra ornare, eros dolor interdum nulla, ut commodo diam libero vitae erat. Aenean faucibus nibh et justo cursus id rutrum lorem imperdiet. Nunc ut sem vitae risus tristique posuere.
Heading 1
Heading 2
Heading 3
Heading 4
Heading 5
Heading 6
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur.
Block quote
Ordered list
- Item 1
- Item 2
- Item 3
Unordered list
- Item A
- Item B
- Item C
Bold text
Emphasis
Superscript
Subscript

- Sense-to-Warn
- 2026
Legacy Sensor Integration | CBRN reconnaissance
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Suspendisse varius enim in eros elementum tristique. Duis cursus, mi quis viverra ornare, eros dolor interdum nulla, ut commodo diam libero vitae erat. Aenean faucibus nibh et justo cursus id rutrum lorem imperdiet. Nunc ut sem vitae risus tristique posuere.
Heading 1
Heading 2
Heading 3
Heading 4
Heading 5
Heading 6
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua. Ut enim ad minim veniam, quis nostrud exercitation ullamco laboris nisi ut aliquip ex ea commodo consequat. Duis aute irure dolor in reprehenderit in voluptate velit esse cillum dolore eu fugiat nulla pariatur.
Block quote
Ordered list
- Item 1
- Item 2
- Item 3
Unordered list
- Item A
- Item B
- Item C
Bold text
Emphasis
Superscript
Subscript

